AGV
导航一直是智能小车AGV的核心技术,磁条导航、激光导航、二维码导航、自然导航等技术之后,最近,视觉导航从后台走向了前台,引起AGV行业的重视。
视觉导航即通过视觉摄像头捕捉图像信息,以获取移动物体在空间中所处的位置、方向和其他环境信息,并用一定的算法对所获信息进行处理,建立环境模型,进而寻找一条最优或近似最优的无碰路径,实现安全移动,到达目的地。
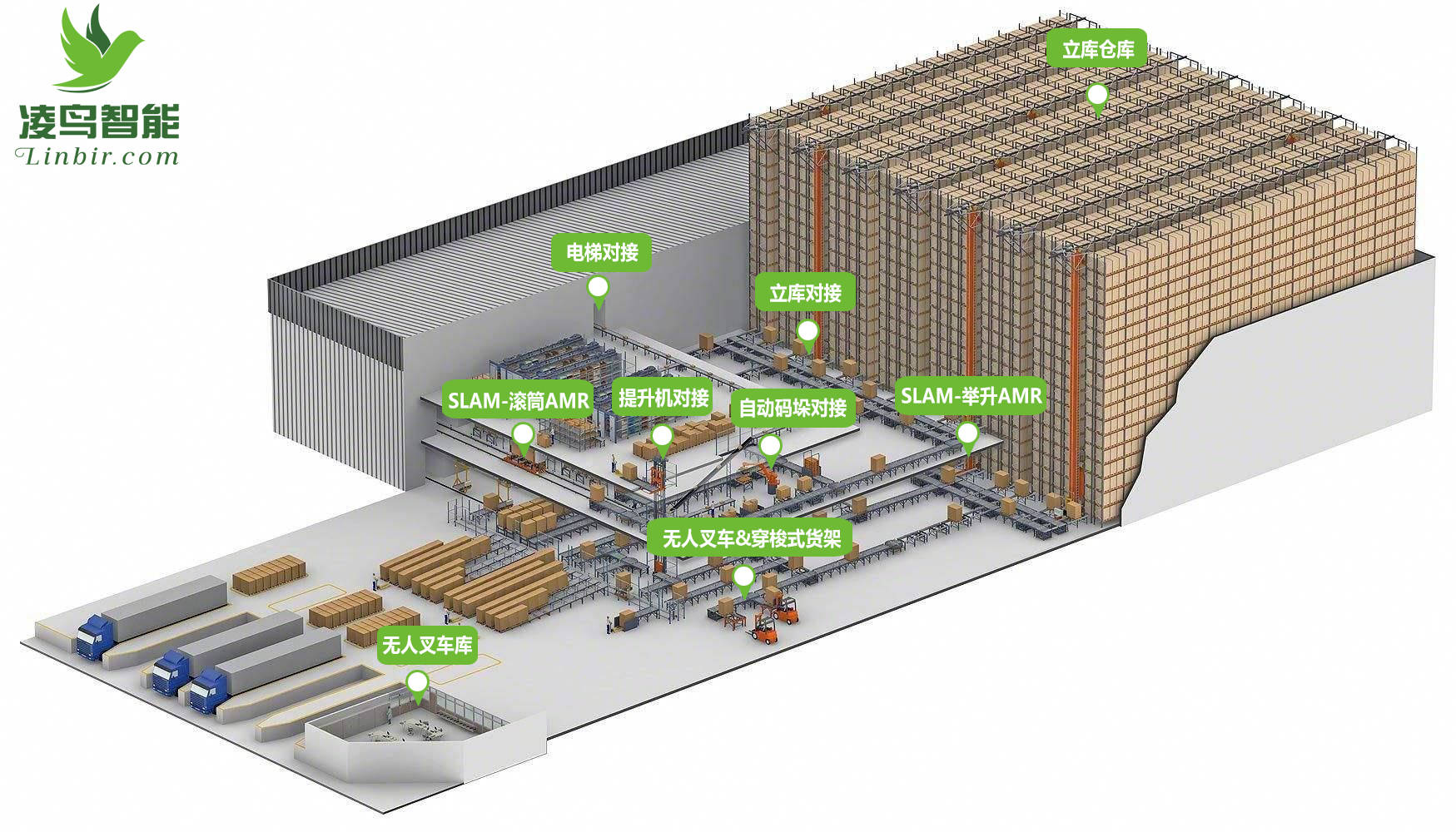 AGV物流仓储
AGV物流仓储
视觉导航的核心是通过摄像头采集环境图像,结合计算机视觉算法实现定位与路径规划。其技术逻辑可分为三个层次:
环境感知:通过摄像头实时捕捉周围环境,识别地面特征(如二维码、纹理、颜色等)或动态障碍物(如行人、叉车)。
数据处理:利用深度学习模型对图像进行特征提取与匹配,结合SLAM(同步定位与地图构建)技术构建环境地图。
决策控制:根据实时位置与目标点,动态规划最优路径,并通过电机驱动系统实现精准移动。
AGV小车
视觉导航通过视觉传感器采集周围环境中的地理信息,经过图像处理和识别,生成导航指令。与非视觉类传感器相比,视觉传感器具有无噪声、无有害影响、信息量大等特点。在实际应用中,只需在路面上画出路径引导线或者路标图形, AGV就可以通过视觉导航系统来控制自身行走。
相对于埋设导线/磁条、安装磁钉等方法而言, 视觉导航进一步增强了系统的灵活性, 并且降低了安装使用成本,同时视觉识别也可以避免出现如惯性导航等虚拟路径导航方法存在的误差积累问题(在部分应用中,视觉可以作为惯性导航的误差校正方法)。相对于激光导航方法,视觉导航的优势在于其低廉的系统硬件成本以及识别功能的扩展能力——只要软件和模式识别功能足够智能,自动导引车就可以实现多种导航和定位功能。
 AGV超薄车
AGV超薄车
尽管视觉导航技术已取得显著进展,但仍面临以下挑战:
复杂环境适应性:在强光、反光或低光照环境下,摄像头可能无法准确识别特征,需结合红外或激光雷达增强精准性。
算法优化:深度学习模型需持续训练以提升识别准确率,同时需平衡计算资源与实时性。
标准化缺失:目前视觉导航系统缺乏统一接口标准,导致不同厂商设备难以互联。
视觉识别导航方法,由于其对地面适应性广、地理标签耐重载、导航精度高、硬件成本低等优点,已经在电子制造、家电生产、电气制造等工业领域得到成功应用。由于视觉导航技术有一定的技术难度,因此目前国内的应用数量少。随着视觉导航系统硬件成本逐渐下降,以及导航技术的不断发展,这类AGV系统将进一步扩展在制造业厂内物流系统中的应用。
地牛AGV
AGV视觉导航不仅是技术的升级,更是物流自动化从“机械执行”到“智能决策”的跨越。随着AI、5G等技术的成熟,视觉导航AGV将成为智能制造与智慧物流的核心载体,推动行业向更高效、更柔性、更绿色的方向发展。未来,我们或许将看到AGV通过“视觉”与“智能”的结合,自主完成从仓储到配送的全流程,真正实现“无人化”物流。
审核编辑 黄宇